Figure.1
| PolarSPARC |
Hands-on Primer on Rasa - Part 1
| Bhaskar S | 11/08/2024 |
Overview
In order to drive operational efficiencies as well as engage customers, the modern Enterprises are increasingly deploying and making use of intelligent Chatbot assistants (or agents) that have human-like conversations with the customers using natural language processing and machine learning techniques.
Rasa is a popular, open source framework that enables one to build custom, task oriented, chatbot assistant system, which facilitates a two-way conversation between a human user and a system, and over a period of time the chatbot system learns from the interactions.
The Rasa platform consits of the following two important sub-systems:
Rasa Natural Language Understanding (or Rasa NLU) which is responsible for identifying the intent and extracting entities from the user input message. In other words, it is a user input message classifier. By default, Rasa uses a custom transformer model called Dual Intent and Entity Transformer (or DIET for short)
Rasa Core which is responsible for taking the appropriate action based on the intent of the user input message and guiding the conversational flow. In other words, it is a probabilistic state machine that determines the next step to take
In the first part of this primer, we will demonstrate how one can effectively setup and run the Rasa platform using a Docker image.
Installation and Setup
The installation and setup will be on a Ubuntu 22.04 LTS based Linux desktop. Ensure that Docker is installed and setup on the desktop (see instructions).
Also, ensure that the Python 3.x programming language is installed. In addition, ensure the cli utilities curl and jq are also installed.
We will setup the required directory structure by executing the following command in a terminal window:
$ mkdir -p $HOME/.rasa/actions
To pull and download the current version of the docker image for Rasa (3.10.8 at the time of this article), execute the following command in a terminal window:
$ docker pull rasa/rasa-pro:3.10.8
The following should be the typical output:
3.10.8: Pulling from rasa/rasa-pro 7646c8da3324: Pull complete 0de6c9c5bbc0: Pull complete 4f4fb700ef54: Pull complete f43a6fa70b0a: Pull complete 7e962051ba34: Pull complete 8bbc3839fc25: Pull complete Digest: sha256:607c1c12365b2086d657544d7bf974334d07b982dda3fd99487c64fe83e09b57 Status: Downloaded newer image for rasa/rasa-pro:3.10.8 docker.io/rasa/rasa-pro:3.10.8
This completes all the system installation and setup for the Rasa hands-on demonstration.
Hands-on with Rasa
Before one can get started with the hands-on experiments, one should request a free Rasa Pro developer License Key and assign the key to the environment variable RASA_PRO_LICENSE.
To test the Rasa platform, execute the following command in the terminal window:
$ docker run --rm --name rasa-pro -e RASA_PRO_LICENSE=${RASA_PRO_LICENSE} rasa/rasa-pro:3.10.8 --help
The following should be the typical output:
usage: rasa [-h] [--version]
{init,run,shell,train,interactive,telemetry,test,visualize,data,export,x,evaluate,llm,studio,license,markers,inspect}
...
Rasa command line interface. Rasa allows you to build your own conversational
assistants. The 'rasa' command allows you to easily run most common commands
like creating a new bot, training or evaluating models.
positional arguments:
{init,run,shell,train,interactive,telemetry,test,visualize,data,export,x,evaluate,llm,studio,license,markers,inspect}
Rasa commands
init Creates a new project, with example training data,
actions, and config files.
run Starts a Rasa server with your trained model.
shell Loads your trained model and lets you talk to your
assistant on the command line.
train Trains a Rasa model using your NLU data and stories.
interactive Starts an interactive learning session to create new
training data for a Rasa model by chatting.
telemetry Configuration of Rasa Pro telemetry reporting.
test Tests Rasa models using your test NLU data and
stories.
visualize Visualize stories.
data Utils for the Rasa training files.
export Export conversations using an event broker.
x Run a Rasa server in a mode that enables connecting to
Rasa Enterprise as the config endpoint.
evaluate Tools for evaluating models.
llm Commands related to LLMs.
studio Rasa Studio commands.
license Displays licensing information.
markers Rasa Studio commands.
inspect Loads your trained model and lets you talk to your
assistant in the browser.
In order to use the Rasa chatbot platform, one needs to first initialize a new project.
To initialize and setup a new Rasa chatbot instance, execute the following command in the terminal window:
$ docker run --rm --name rasa-pro -u $(id -u $USER):$(id -g $USER) -v $HOME/.rasa/:/app -e RASA_PRO_LICENSE=${RASA_PRO_LICENSE} rasa/rasa-pro:3.10.8 init --no-prompt
The following should be the typical trimmed output:
2024-11-02 18:43:25 INFO root - copying /opt/venv/lib/python3.10/site-packages/rasa/cli/project_templates/default/domain.yml -> .
2024-11-02 18:43:25 INFO root - creating data
2024-11-02 18:43:25 INFO root - copying /opt/venv/lib/python3.10/site-packages/rasa/cli/project_templates/default/data/rules.yml -> ./data
2024-11-02 18:43:25 INFO root - copying /opt/venv/lib/python3.10/site-packages/rasa/cli/project_templates/default/data/nlu.yml -> ./data
2024-11-02 18:43:25 INFO root - copying /opt/venv/lib/python3.10/site-packages/rasa/cli/project_templates/default/data/stories.yml -> ./data
2024-11-02 18:43:25 INFO root - creating tests
2024-11-02 18:43:25 INFO root - copying /opt/venv/lib/python3.10/site-packages/rasa/cli/project_templates/default/tests/test_stories.yml -> ./tests
2024-11-02 18:43:25 INFO root - copying /opt/venv/lib/python3.10/site-packages/rasa/cli/project_templates/default/credentials.yml -> .
2024-11-02 18:43:25 INFO root - copying /opt/venv/lib/python3.10/site-packages/rasa/cli/project_templates/default/endpoints.yml -> .
2024-11-02 18:43:25 INFO root - copying /opt/venv/lib/python3.10/site-packages/rasa/cli/project_templates/default/config.yml -> .
2024-11-02 18:43:25 INFO root - copying /opt/venv/lib/python3.10/site-packages/rasa/cli/project_templates/default/actions/__init__.py -> ./actions
2024-11-02 18:43:25 INFO root - copying /opt/venv/lib/python3.10/site-packages/rasa/cli/project_templates/default/actions/actions.py -> ./actions
2024-11-02 18:43:25 INFO root - creating actions/__pycache__
2024-11-02 18:43:25 INFO root - copying /opt/venv/lib/python3.10/site-packages/rasa/cli/project_templates/default/actions/__pycache__/__init__.cpython-310.pyc -> ./actions/__pycache__
2024-11-02 18:43:25 INFO root - copying /opt/venv/lib/python3.10/site-packages/rasa/cli/project_templates/default/actions/__pycache__/actions.cpython-310.pyc -> ./actions/__pycache__
[ ... SNIP ... ]
Created project directory at '/app'.
Finished creating project structure.
Training an initial model...
The configuration for policies and pipeline was chosen automatically. It was written into the config file at 'config.yml'.
Epochs: 100% |||||||||| 100/100 [00:13<00:00, 7.39it/s, t_loss=1.14, i_acc=1]
2024-11-02 18:43:44 INFO rasa.engine.training.hooks - Finished training component 'DIETClassifier'.
2024-11-02 18:43:44 INFO rasa.engine.training.hooks - Starting to train component 'EntitySynonymMapper'.
2024-11-02 18:43:44 INFO rasa.engine.training.hooks - Finished training component 'EntitySynonymMapper'.
2024-11-02 18:43:45 INFO rasa.engine.training.hooks - Starting to train component 'ResponseSelector'.
2024-11-02 18:43:45 INFO rasa.nlu.selectors.response_selector - Retrieval intent parameter was left to its default value. This response selector will be trained on training examples combining all retrieval intents.
2024-11-02 18:43:45 INFO rasa.engine.training.hooks - Finished training component 'ResponseSelector'.
Processed story blocks: 100% |||||||||| 3/3 [00:00<00:00, 3637.73it/s, # trackers=1]
Processed story blocks: 100% |||||||||| 3/3 [00:00<00:00, 1485.59it/s, # trackers=3]
Processed story blocks: 100% |||||||||| 3/3 [00:00<00:00, 350.85it/s, # trackers=12]
Processed story blocks: 100% |||||||||| 3/3 [00:00<00:00, 88.47it/s, # trackers=39]
Processed rules: 100% |||||||||| 2/2 [00:00<00:00, 5548.02it/s, # trackers=1]
2024-11-02 18:43:45 INFO rasa.engine.training.hooks - Starting to train component 'MemoizationPolicy'.
Processed trackers: 100% |||||||||| 3/3 [00:00<00:00, 3318.28it/s, # action=12]
Processed actions: 12it [00:00, 16666.11it/s, # examples=12]
2024-11-02 18:43:45 INFO rasa.engine.training.hooks - Finished training component 'MemoizationPolicy'.
2024-11-02 18:43:45 INFO rasa.engine.training.hooks - Starting to train component 'RulePolicy'.
Processed trackers: 100% |||||||||| 2/2 [00:00<00:00, 2789.69it/s, # action=5]
Processed actions: 5it [00:00, 26579.87it/s, # examples=4]
Processed trackers: 100% |||||||||| 3/3 [00:00<00:00, 3615.78it/s, # action=12]
Processed trackers: 100% |||||||||| 2/2 [00:00<00:00, 2888.64it/s]
Processed trackers: 100% |||||||||| 5/5 [00:00<00:00, 2022.33it/s]
2024-11-02 18:43:45 INFO rasa.engine.training.hooks - Finished training component 'RulePolicy'.
2024-11-02 18:43:45 INFO rasa.engine.training.hooks - Starting to train component 'TEDPolicy'.
Processed trackers: 100% |||||||||| 120/120 [00:00<00:00, 2776.05it/s, # action=30]
Epochs: 100%|||||||||| 100/100 [00:07<00:00, 13.36it/s, t_loss=2.29, loss=2.13, acc=0.967]
2024-11-02 18:43:53 INFO rasa.engine.training.hooks - Finished training component 'TEDPolicy'.
[ ... SNIP ... ]
2024-11-02 18:44:05 INFO rasa.model_training - {"event_info": "Your Rasa model is trained and saved at 'models/20241102-181642-avocado-bright.tar.gz'.", "event": "model_training.train.finished_training", "level": "info"}
If you want to speak to the assistant, run 'rasa shell' at any time inside the project directory.
Post the initialization, the default Rasa chatbot deployed is a very basic chatbot that identifies if the user is happy or unhappy and takes the appropriate actions.
To test the deployed chatbot, execute the following command in the terminal window:
$ docker run -it --rm --name rasa-pro -u $(id -u $USER):$(id -g $USER) -v $HOME/.rasa/:/app -e RASA_PRO_LICENSE=${RASA_PRO_LICENSE} rasa/rasa-pro:3.10.8 shell
The following should be the typical trimmed output:
[ ... SNIP ... ] 2024-11-03 01:39:04 INFO root - Starting Rasa server on http://0.0.0.0:5005 2024-11-03 01:39:10 INFO rasa.core.processor - Loading model models/20241102-181642-avocado-bright.tar.gz... [ ... SNIP ... ] 2024-11-03 01:39:30 INFO root - Rasa server is up and running. Bot loaded. Type a message and press enter (use '/stop' to exit): Your input ->
Notice that the chatbot is waiting for user input on the prompt Your input ->.
Type Hello! at the chatbot prompt.
The following should be the typical output:
Hey! How are you?
Next, type feel bad at the chatbot prompt.
The following should be the typical output:
Here is something to cheer you up: Image: https://i.imgur.com/nGF1K8f.jpg Did that help you?
Looks like the link for the above image is broken - should have been a picture of a cute baby tiger !!!
Next, type feel good at the chatbot prompt.
The following should be the typical output:
Great, carry on!
Finally, type /stop at the chatbot prompt and the chatbot will exit.
We will now start the Rasa chatbot in the server mode and interact with the chatbot via APIs.
Assuming that the ip address of the desktop is 192.168.1.25, to start the Rasa chatbot server, execute the following command in the terminal window:
$ docker run -it --rm --name rasa-pro --network="host" -u $(id -u $USER):$(id -g $USER) -v $HOME/.rasa/:/app -e RASA_PRO_LICENSE=${RASA_PRO_LICENSE} rasa/rasa-pro:3.10.8 run --enable-api --cors “*” -i 192.168.1.25
The following should be the typical trimmed output:
2024-11-03 01:51:53 INFO rasa.tracing.config - No endpoint for tracing type available in endpoints.yml,tracing will not be configured. 2024-11-03 01:51:55 INFO root - Starting Rasa server on http://192.168.1.25:5005 [ ... SNIP ... ] 2024-11-03 01:51:59 INFO rasa.core.processor - Loading model models/20241102-181642-avocado-bright.tar.gz... [ ... SNIP ... ] 2024-11-03 01:52:20 INFO root - Rasa server is up and running. [2024-11-03 01:52:20 +0000] [1] [INFO] Starting worker [1] 2024-11-03 01:52:20 INFO sanic.server - Starting worker [1]
To check the version of the Rasa chatbot instance, execute the following command in a terminal window:
$ curl -s http://192.168.1.25:5005/version | jq
The following should be the typical output:
{
"version": "3.10.8",
"minimum_compatible_version": "3.10.0rc1"
}
To send the Hello message to the Rasa chatbot, execute the following command in a terminal window:
$ curl -s http://192.168.1.25:5005/webhooks/rest/webhook -X POST -d '{"sender": "user", "message": "hello"}' | jq
The following should be the typical output:
[
{
"recipient_id": "user",
"text": "Hey! How are you?"
}
]
To send the feel bad message to the Rasa chatbot, execute the following command in a terminal window:
$ curl -s http://192.168.1.25:5005/webhooks/rest/webhook -X POST -d '{"sender": "user", "message": "feel bad"}' | jq
The following should be the typical output:
[
{
"recipient_id": "user",
"text": "Here is something to cheer you up:"
},
{
"recipient_id": "user",
"image": "https://i.imgur.com/nGF1K8f.jpg"
},
{
"recipient_id": "user",
"text": "Did that help you?"
}
]
Finally, to send the feel good message to the Rasa chatbot, execute the following command in a terminal window:
$ curl -s http://192.168.1.25:5005/webhooks/rest/webhook -X POST -d '{"sender": "user", "message": "feel good"}' | jq
The following should be the typical output:
[
{
"recipient_id": "user",
"text": "Great, carry on!"
}
]
WALLA - we have successfully tested the deployed basic Rasa chatbot !
Before we proceed any further, let us dive into some core concepts of the Rasa chatbot platform. The following are some of the core concepts to understand:
Domain :: defines the conversational universe of the chatbot. In other words, it is the set of inputs to and outputs from the chatbot
Intent :: the category of things the users of the chatbot are conversing about
Entities :: are the structured pieces of information extracted from the conversational text provided by the users of the chatbot. Examples include numbers, dates, locations, product names, etc
Slots :: are similar to a key-value memory store of the chatbot which is used to store important information gathered from a conversation and can be used later in specific contexts
Actions :: are things the chatbot actually needs to perform to fulfill the needs of the user. In other words, it is the steps the chatbot executes before responding in a conversation
Policies :: help a chatbot decide which action to take at each step in a conversation. They can be rules based and machine-learning based
Stories :: are a type of training data used to train the chatbot on what it should do next
Rules :: are a type of training data used to train the chatbot whose conversations would always follow the same path
Forms :: are a way to collect additional pieces of information from the user of the chatbot in order to perform a specific action with the provided users' preferences
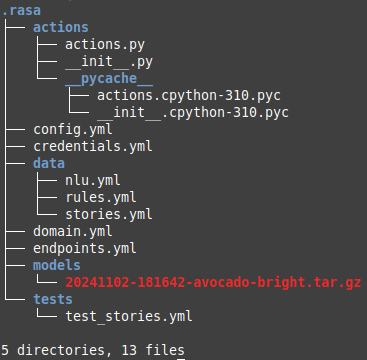
The following is the structure and contents of the directory $HOME/.rasa/ post initialization. Note that the directory was empty when we first started:
We will now navigate the directory structure shown above and outline the purpose of most important files in the following section:
config.yml :: defines the components and policies that the Rasa chatbot model will use to make predictions on the next step based on the user input
domain.yml :: defines the universe in which the Rasa chatbot operates. It specifies the intents, entities, slots, responses, actions, etc the chatbot should know about
endpoints.yml :: defines the various network endpoints the Rasa chatbot can communicate with
data/nlu.yml :: defines the training data examples of all user utterances categorized by intent, along with examples of entities that can be extracted from user messages
data/stories.yml :: defines the training data for the various dynamic dialog scenarios which represent the users intent to the corresponding Rasa chatbot response based on certain actions
data/rules.yml :: defines the training data for the dialog situations in which the users intent and the corresponding Rasa chatbot response that always follow the same steps
Given that we have covered the setup, testing, core concepts, and main platform files, we conclude Part-1 of this series !!!
References